
拋噴丸強化是一種廣泛使用的方法,其在工件表面產(chǎn)生壓縮應力,使其更耐用。如許多制造工藝一樣,拋噴丸強化也需要包括應力值的質(zhì)量控制。用于測量拋噴丸強化工件殘余應力的常用技術(shù)是X射線衍射。
Stresstech在無損過程控制和質(zhì)量檢驗方面擁有30多年的經(jīng)驗。Stresstech產(chǎn)品線包括利用巴克豪森噪聲技術(shù)、孔鉆(ESPI:電子散斑圖案干涉術(shù))以及本文焦點 - X射線衍射的應力分析儀。隨著技術(shù)和制造的進步,產(chǎn)品線包括許多自動測量功能,并使用了工業(yè)機器人。工業(yè)機器人可用于測量具有復雜形狀和寬表面工件的殘余應力,通過自動化創(chuàng)建靈活的測量過程。Stresstech機器人的X射線測量系統(tǒng)被稱為Xstress機器人。

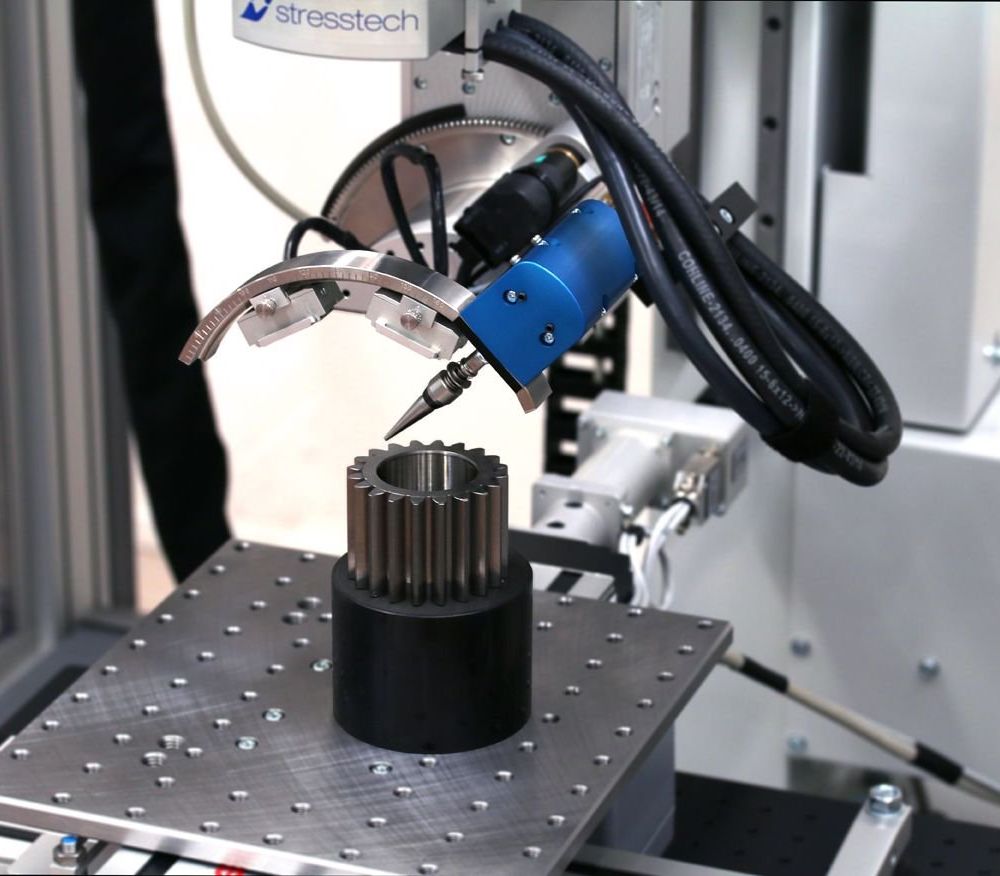
圖1:機器人通過 X 射線衍射在具有復雜形狀、寬表面或難以到達區(qū)域的零件上簡易測量殘余應力
根據(jù)X射線衍射數(shù)據(jù)測定殘余應力
X射線是具有較短波長(即比可見光具有更高的能量)的電磁輻射波。短波長X射線非常適合探測材料中的面間距。使用面間距作為極限標距長度,X射線技術(shù)是理想的技術(shù),并適用于所有結(jié)晶材料,特別是金屬,同時也適用于陶瓷。其測量應力,而無需無應力樣品進行校準。
具有周期性晶格結(jié)構(gòu)的材料可以用所謂的單位晶胞描述,其是包含用于各種材料晶體結(jié)構(gòu)信息的小體積單元。通過連接原子所在的點形成晶格結(jié)構(gòu)。用于描述這些單位晶胞的常用的坐標系是米勒指數(shù)計數(shù)法。
常見的X射線源是X射線管,其中電子被轟擊至目標金屬陽極。通過加熱充當陰極的鎢絲形成熱離子電子。用高電壓(25 kV至60 kV)將電子加速,這給予電子足夠的能量使其從目標金屬原子,發(fā)射特定于陽極材料的標識特征射線,這種接近單色射線可用于X射線衍射分析。
通過衍射峰位置計算應變,由衍射數(shù)據(jù)確定殘余應力。作用在測量材料上的應力改變了晶面間距,其可以被測量。在實踐中,首先測量無應力的金屬粉末以對特定材料的器件進行校準。在校準期間,將檢測器放置到粉末的已知衍射角,并設(shè)置角度盤。然后通過測量具有多個傾斜角的晶格距離來計算應力,并且結(jié)果被繪制為d vs sin2X圖,其中d是測量的晶面間距,X是傾斜角。可從該d vs sin2X圖的斜率確定殘余應力。
X射線衍射是測量殘余應力的非破壞性的、簡便的方法。曝光區(qū)域量會影響測量時間,而使用較大的準直器會減少測量所需時間。

圖2:來自晶格面的X射線衍射(布拉格定律)
布拉格定律描述了來自晶格面的X射線衍射。表示為λ=2dsinθ,其中λ是X射線的波長,d是晶面間距,θ是衍射角,如圖2所示。布拉格定律假定入射波和衍射波同相并經(jīng)歷相長干涉。布拉格定律已證明其本身是的、正確的,使其成為衍射應用的有用工具。
用機器人達到極限
工業(yè)機器人系統(tǒng)包括具有多個軸的機器人臂,其由機器人控制器控制。控制器還可以控制外部軸和旋轉(zhuǎn)單元,可用于操作工件。機器人具有不同的尺寸、不同的有效載荷和可達性。機器人應用的重要部分是附接到機器人凸緣的工具,機器人需要完成其任務。該工具幾乎可以是任何東西:夾子、焊槍、點膠機等。機器人系統(tǒng)通常具有外圍I/O設(shè)備,其可以通過機器人控制器進行操作和監(jiān)視。其中一個關(guān)鍵特征是機器人也是可重新編程的。
Xstress機器人系統(tǒng)是用于測量殘余應力的交鑰匙解決方案。它使用工業(yè)機器人作為測角儀,從而為測量過程帶來更多的靈活性和自動化。Xstress機器人系統(tǒng)由包括機器人控制器、X射線管和準直器的工業(yè)機器人、X3003主機和帶有XTronic軟件的計算機組成。作為選項,Xstress機器人可以使用迷你管而非標準的G3 X射線管進入圖3所示的較小空間。
在X射線測量中使用Xstress機器人與工業(yè)機器人的優(yōu)勢是能夠?qū)?/span>G3測量頭移動到其他難以到達的空間,從而生成準確的測量結(jié)果。寬工作區(qū)為Xstress機器人提供了測量大型、復雜零件的方法,無需在測量之間移動零件。此外,由于XTronic中測量點的映射特征,測量過程是自動的。Xstress機器人是敏捷的,能移動至難以到達的位置(如可以移動至圓柱形管),而對標準測角儀來說這是一個不可能的任務。機器人可輕易地將測量頭帶入管內(nèi)以測量如圖4所示的管焊縫的應力。

圖4:Xstress機器人測量圓柱體零件的內(nèi)部
該系統(tǒng)可以包括外部軸線以在測量期間旋轉(zhuǎn)諸如曲軸的零件,從而給予機器人更多的可用于測量的空間。Xstress機器人系統(tǒng)可以利用旋轉(zhuǎn)軸訪問:例如軸的各側(cè)。旋轉(zhuǎn)單元是高度自動化應用的理想選擇,如圖5所示。
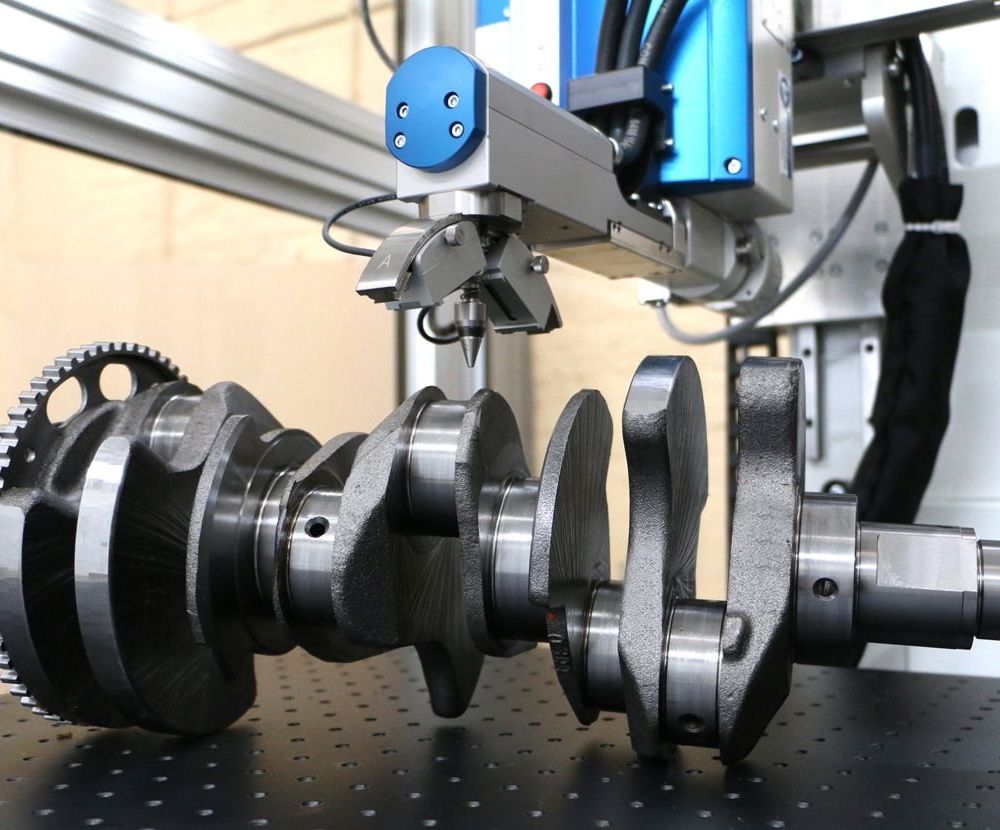
圖5:Xstress機器人在曲軸上進行測量
使用方便
Stresstech在設(shè)計Xstress機器人時考慮了終用戶。大多數(shù)工作是使用XTronic軟件完成的,XTronic軟件控制機器人并計算殘余應力。在正常操作中,首先將附接到機器人臂的G3測角儀手動定位到測量位置。位置被映射到測量程序,然后通過XTronic軟件加以執(zhí)行。在測量程序期間,機器人將G3測角儀移動到測量位置,并根據(jù)XTronic中定義的參數(shù)測量工件。實時計算殘余應力,用XTronic在圖中顯示數(shù)據(jù)。終用戶無需為數(shù)據(jù)處理花費時間,因為能以用戶友好的形式從XTronic中即刻讀取測量結(jié)果。
XTronic提供各種功能支持Xstress機器人測角儀的操作。可以通過XTronic將機器人移動到編程位置,無需使用機器人示教器。這有助于驗證測量點。此外,XTronic具有對準X射線管以實現(xiàn)更準確測量結(jié)果的功能。必須手動進行標準測角儀的對準,機器人測角儀只能通過修改XTronic的工具數(shù)據(jù)和機器人自動對準本身進行對齊。
測量服務
Stresstech集團在芬蘭、德國、印度和美國的實驗室設(shè)施為客戶提供不同方法的測量服務。客戶可以將拋噴丸強化的工件直接送到實驗室進行X射線測量。該服務是一個很好的選擇,若需測量有*的工件,安裝自己的機器人系統(tǒng)將不再是所要求的解決方案。Stresstech的測量實驗室配備了各種測量工具,包括Xstress機器人系統(tǒng),主要用于測量大型、復雜的工件。也可以尋求當?shù)豾
若需測量的工件太大,則無法將其送到實驗室。由于Xstress Robot的移動性,也可以在現(xiàn)場進行測量。在測量實驗室使用的Xstress機器人系統(tǒng)是一個安裝在移動推車上的一體化包裝系統(tǒng),能以小的工作量將其帶到客戶的工廠場地。由于Xstress機器人非常緊湊從而可以裝進一輛面包車,可以將整個Xstress機器人系統(tǒng)很容易地運輸?shù)娇蛻舻墓S進行壓力測量。
移動性也有利于機器人的可達性極限。即使極大的工件,也可以通過在測量位置之間移動Xstress機器人而非移動工件來進行測量。首先,機器人可以移動到某個位置,并且所有的測量均可在機器人的可達性內(nèi)完成。接下來,機器人被移動到新位置以用于下一測量,而無需移動重工件。重復該過程,直到完成所有測量。得益于Xstress機器人系統(tǒng)的移動性,能以小的工作量和短測量時間現(xiàn)場測量大型、復雜的工件。
Stresstech Oy的測量服務實驗室為客戶提供服務,是一家通過非破壞性X射線衍射法進行殘余應力和殘余奧氏體測量的測試實驗室。(SFS-EN ISO/IEC 17025:20050)測量實驗室(FINAS T294)。
